Partnerzy






Nasza misja
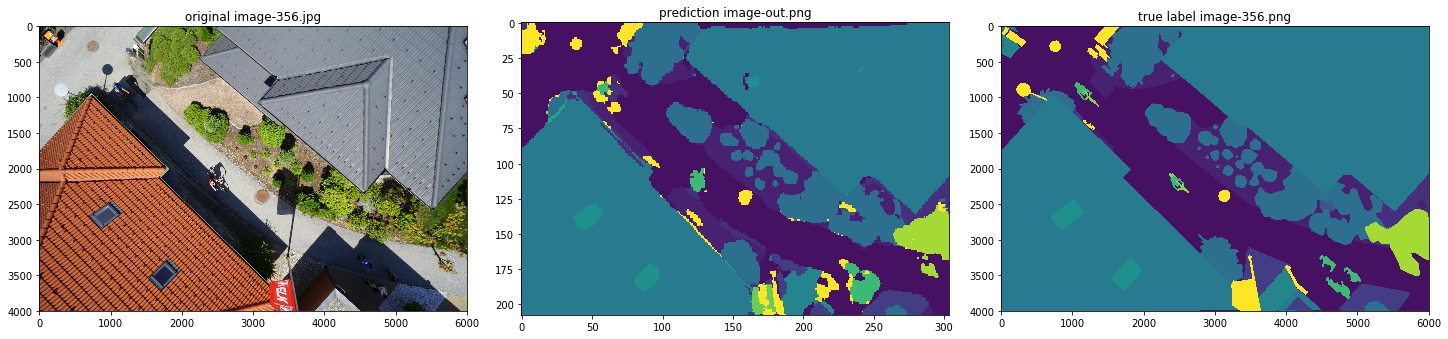
Misją naszego CanSata jest utworzenie podczas lotu mapy terenu na podstawie obrazu z kamery oraz przeprowadzenie w pełni autonomicznego lądowania w pobliżu zlokalizowanego wizualnie charakterystycznego znacznika. Korzystamy w tym celu z technologii komputerowego rozpoznawania obrazów oraz uczenia maszynowego. Nasze oprogramowanie dokonuje klasyfikacji terenu w zakresie kilku kategorii, rozpoznania układu dróg i ulic oraz detekcji poszczególnych obiektów znajdujących się na ziemi. Na podstawie uzyskanych w ten sposób danych oraz informacji o lokalizacji i orientacji CanSata generowana jest w czasie rzeczywistym mapa znajdującego się pod nim terenu. Na jej podstawie urządzenie będzie korygowało trajektorię lotu, tak aby lądowanie miało miejsce w pobliżu ustawionego znacznika. Umożliwia to następny niezbędny element naszego projektu, czyli specjalnie zaprojektowany spadochron komorowy i system do sterowania nim. Na poniższych zdjęciach widać skuteczność jednego z naszych modeli uczenia maszynowego - 96%!
Zespół

Krzysztof Kwiatkowski
Team Leader & Hardware Designer

Piotr Grynfelder
AI & Software Developer

Jakub Bachurski
AI & Mapping Software Developer

Szymon Kotarba
Recovery System Designer

Kajetan Knopp
AI Developer

Jan Zając
Comms Designer
Kontakt
Nowowiejska 37A 02-010 Warszawa Polska
Email: kontakt@deepsat.pl
Facebook: @deepsatpl
LinkedIn: DeepSat